
Dans ce tuto nous allons voir comment réguler un petit système de chauffage par PID avec un Arduino. Nous utiliserons une plaque chauffante PTC en aluminium que l’on va contrôler avec un relai statique SSR. Une sonde de température DS18B20 sera collée sur la plaque chauffante et permettra de mesurer sa température.
Liste du matériel utilisé
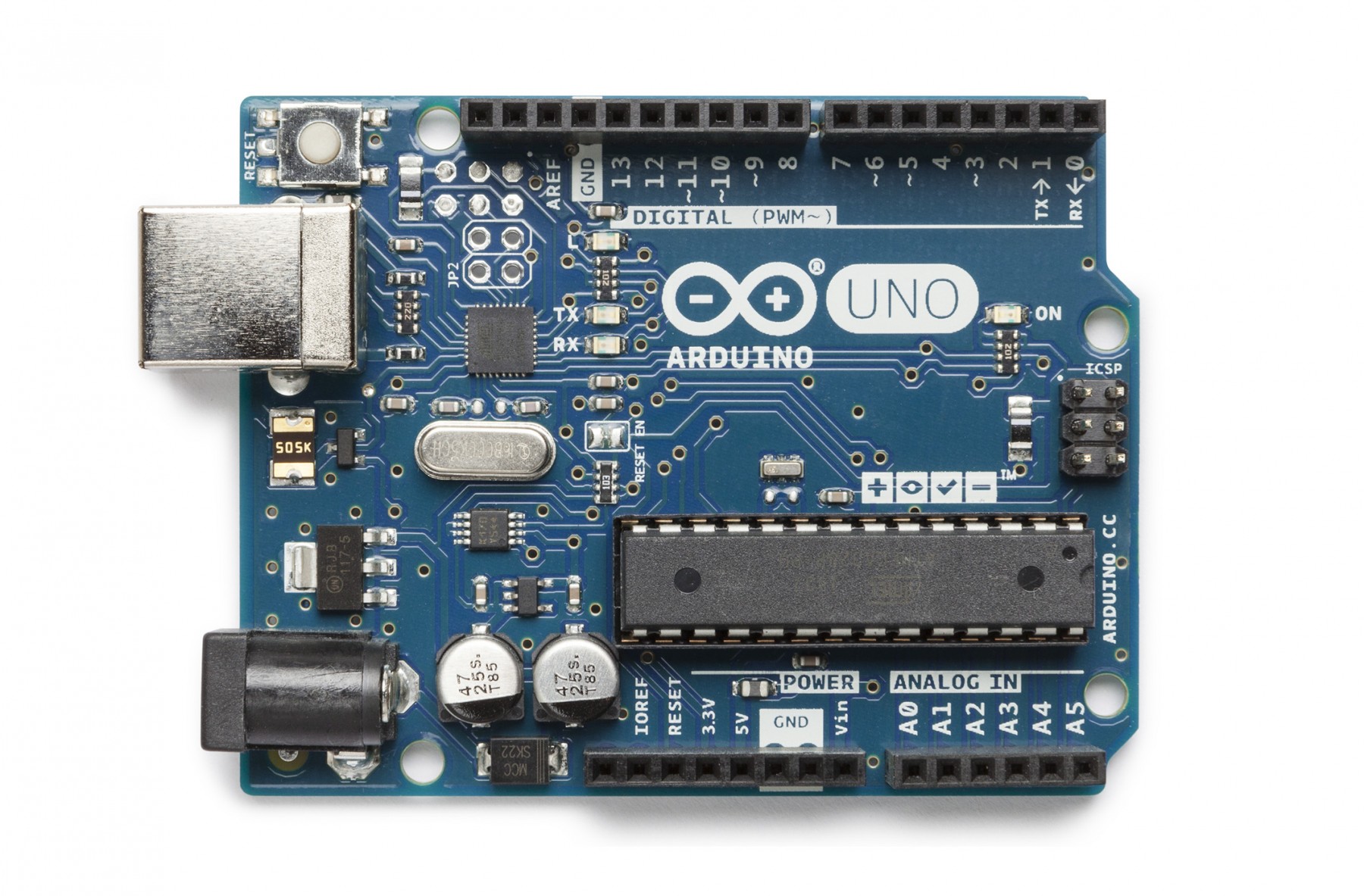
- Arduino Uno
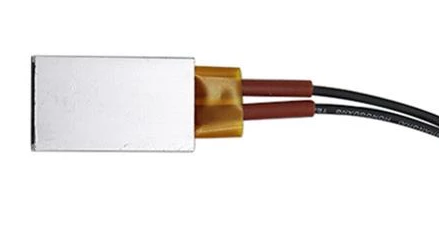
- Plaque chauffante PTC 24V 70°C
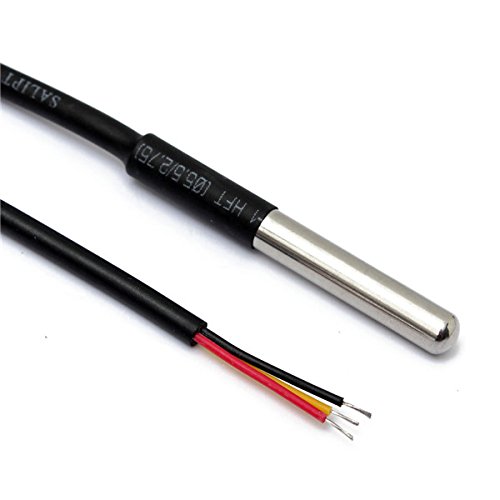
- Capteur de température DS18B20 3 fils
- Relai statique DC-DC

C’est quoi une régulation PID ?
Un régulateur PID est un système de contrôle en boucle fermée. PID est l’abréviation de Proportionnelle Intégrale et Dérivée, les trois actions effectuées par ce régulateur.
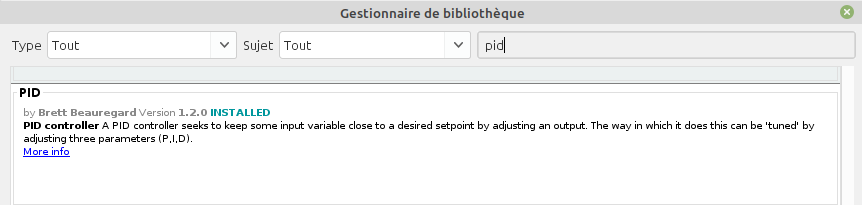
Nous utiliserons la librairie PID disponible dans l’IDE Arduino. La version courante lors de la rédaction de ce tuto est le 1.2.0.
Notre tuto est basé sur l’exemple PID_RelayOutput fourni avec la librairie dont voici le code :
/********************************************************
* PID RelayOutput Example
* Same as basic example, except that this time, the output
* is going to a digital pin which (we presume) is controlling
* a relay. the pid is designed to Output an analog value,
* but the relay can only be On/Off.
*
* to connect them together we use "time proportioning
* control" it's essentially a really slow version of PWM.
* first we decide on a window size (5000mS say.) we then
* set the pid to adjust its output between 0 and that window
* size. lastly, we add some logic that translates the PID
* output into "Relay On Time" with the remainder of the
* window being "Relay Off Time"
********************************************************/
#include <PID_v1.h>
#define PIN_INPUT 0
#define RELAY_PIN 6
//Define Variables we'll be connecting to
double Setpoint, Input, Output;
//Specify the links and initial tuning parameters
double Kp=2, Ki=5, Kd=1;
PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
int WindowSize = 5000;
unsigned long windowStartTime;
void setup()
{
windowStartTime = millis();
//initialize the variables we're linked to
Setpoint = 100;
//tell the PID to range between 0 and the full window size
myPID.SetOutputLimits(0, WindowSize);
//turn the PID on
myPID.SetMode(AUTOMATIC);
}
void loop()
{
Input = analogRead(PIN_INPUT);
myPID.Compute();
/************************************************
* turn the output pin on/off based on pid output
************************************************/
if (millis() - windowStartTime > WindowSize)
{ //time to shift the Relay Window
windowStartTime += WindowSize;
}
if (Output < millis() - windowStartTime) digitalWrite(RELAY_PIN, HIGH);
else digitalWrite(RELAY_PIN, LOW);
}
Attention toutefois, ce code fonctionne avec un relais NC (Normally Closed). Avec un relais NC la plaque chauffante est alimentée lorsque le relais est fermé et donc que lorsque la broche de sortie est à l’état bas (LOW). Dans mon tutoriel, le relai que j’utilise est un relai NO (Normally Opened). La broche de sortie doit donc être à l’état haut (HIGH) pour que la plaque chauffante soit alimentée.
Le bout de code à la fin du programme devra donc être modifié de la sorte :
if (Output < millis() - windowStartTime)
digitalWrite(RELAY_PIN, LOW);
else
digitalWrite(RELAY_PIN, HIGH);
Réglage des paramètres de la régulation PID
La régulation PID doit être paramétrée, elle dépend en effet du système qui est régulé. Il va donc falloir déterminer la valeur des coefficients Kp, Ki et Kd de notre régulateur.
Comme expliqué dans l’article mentionné plus haut le réglage peut s’effectuer en 2 étapes :
- Il faut tout d’abord mettre en place un simple régulateur proportionnel (les coefficients Ki et Kd sont donc nuls). Par essais/erreurs, il faut régler le coefficient Kp afin d’améliorer le temps de réponse du système. C’est-à-dire qu’il faut trouver un Kp qui permette au système de se rapprocher très vite de la consigne tout en faisant attention de garder la stabilité du système : il ne faut pas que le système réponde très vite tout en oscillant beaucoup !
- Une fois ce coefficient réglé, on peut passer au coefficient Ki. Celui-là va permettre d’annuler l’erreur statique finale du système afin que celui-ci respecte exactement la consigne. Il faut donc régler Ki pour avoir une réponse exacte en peu de temps tout en essayant de minimiser les oscillations apportées par l’intégrateur !
- Enfin, si le système n’est pas stable, on peut passer au dernier coefficient Kd qui permet de rendre le système plus stable et permet de diminuer les oscillations.
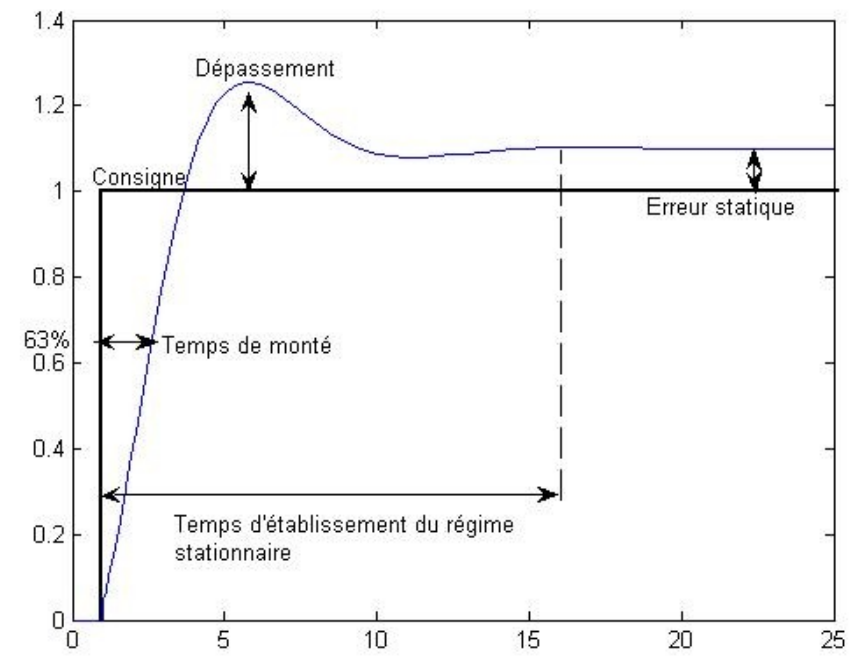
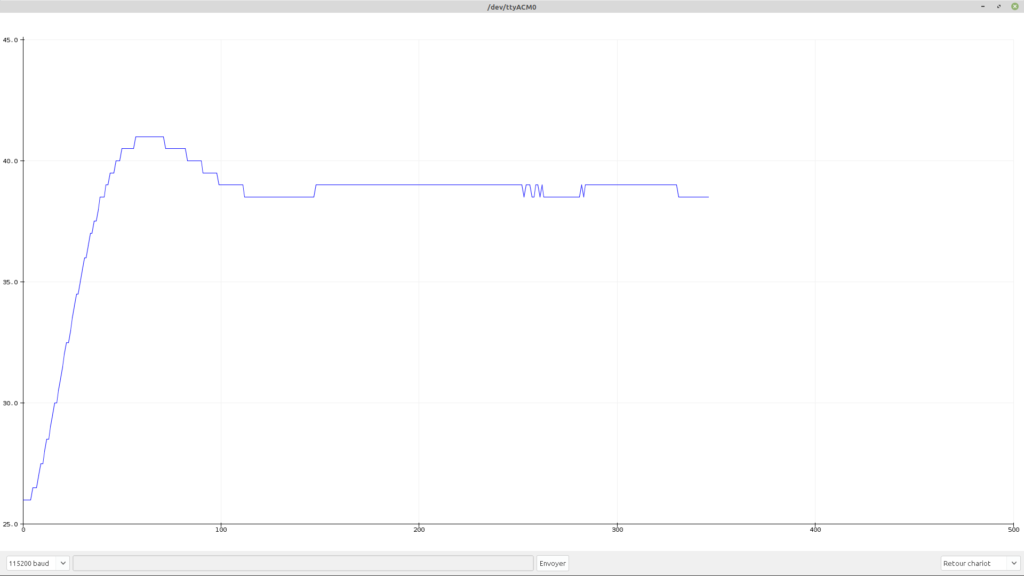
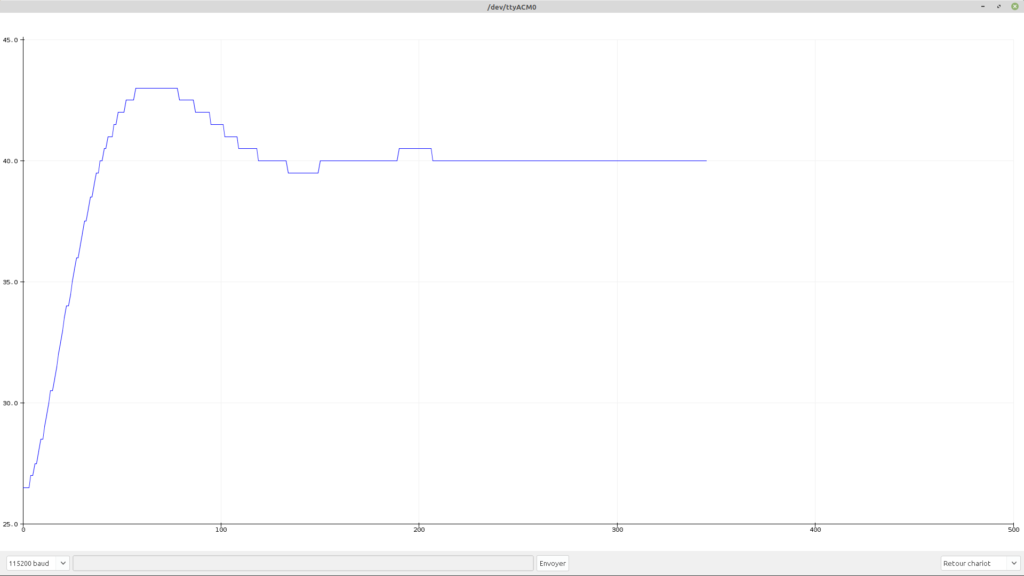
Après plusieurs essais, les paramètres Kp=65, Ki=0.71 et Kd=0 semblent plutôt corrects. La montée est assez rapide, le dépassement acceptable (3°C au dessus de la consigne) et le régime stationnaire est atteint rapidement avec une température stable de 40° au bout de 3 minutes environ.
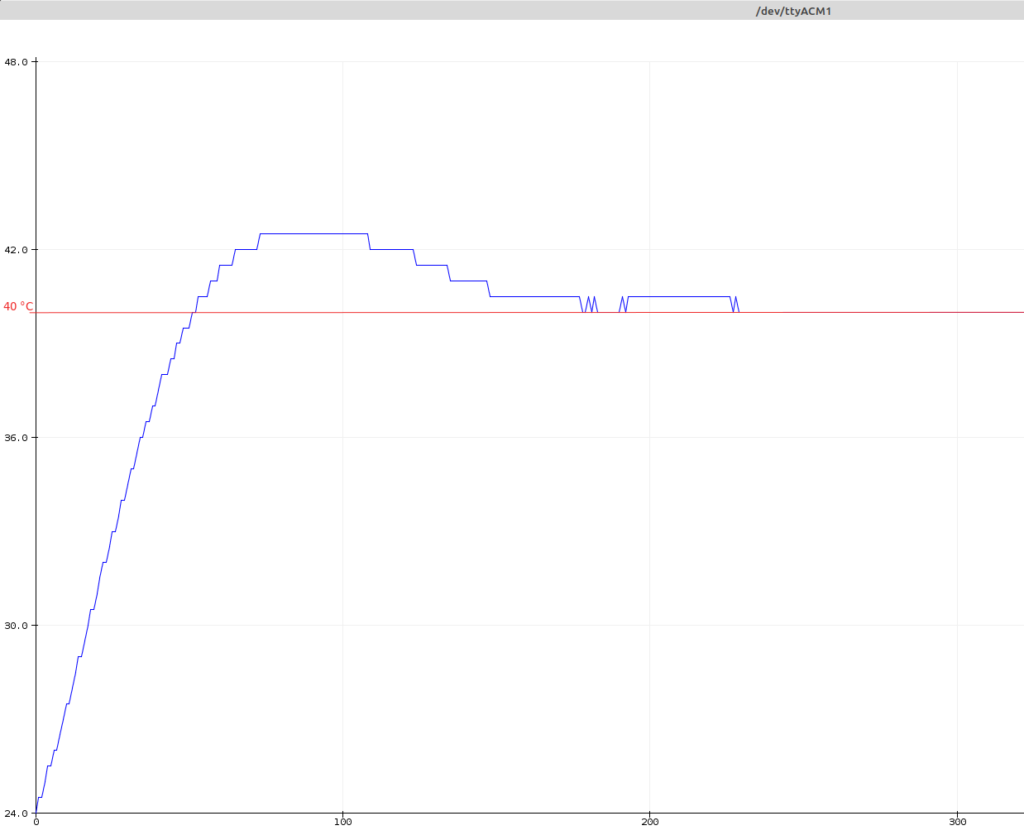
Voici quelques exemples de réglages PID qui ne conviennent pas aux caractéristiques du système.
Visualisation de la consigne de sortie de la régulation PID
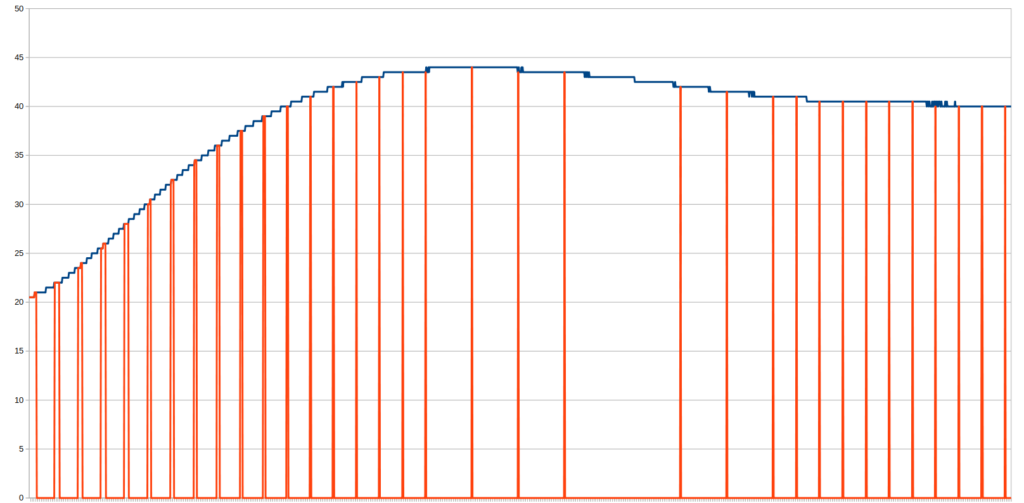
Dans le graphique suivant, vous pouvez visualiser deux courbes :
- La courbe bleue représente l’entrée de la boucle de régulation PID. Elle correspond à la valeur retournée par le capteur de température.
- La courbe rouge représente l’état du relais. Lorsque cette valeur est à 0, cela signifie que le relai est ouvert (la plaque ne chauffe pas). Lorsque cette valeur est différente de 0, cela signifie que le relai est fermé (la plaque chauffe).
On voit que les impulsions sont plus rapprochées et plus longues dans la phase de montée en température. Après une pause qui permet d’atteindre la température de consigne, ces impulsions deviennent brèves et leur fréquence permet de maintenir le système à une température constante.
A t-on vraiment besoin d’une régulation PID ?
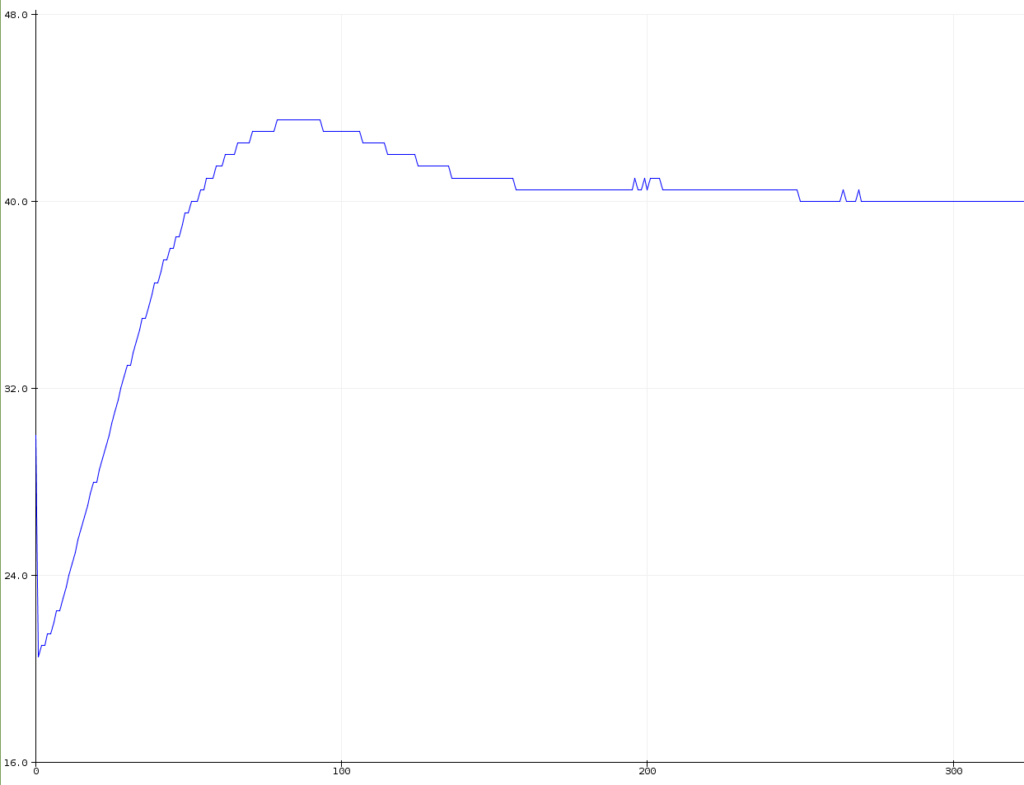
Vous vous posez sûrement la question de savoir si une simple régulation par seuil pourrait convenir. En allumant la plaque chauffante dès que la température est inférieure à 40°C et l’éteignant dès que la température est supérieure ou égale à 40°C. Comme ce simple code par exemple :
if (temp >= 40) {
commande_relai(LOW);
} else {
commande_relai(HIGH);
}
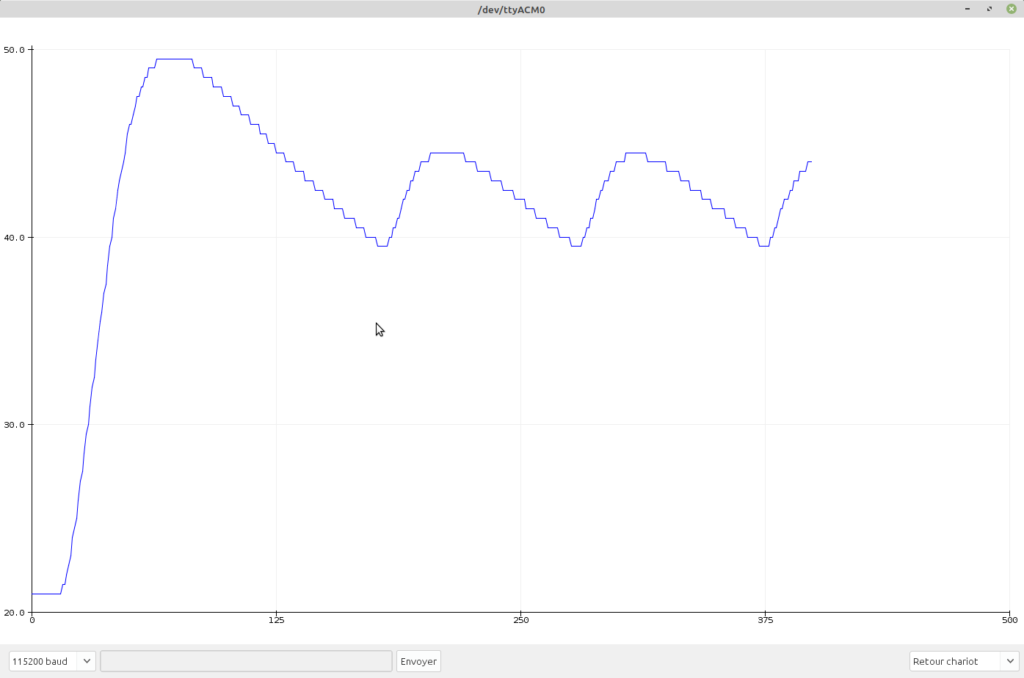
Et bien le résultat est clairement visible sur la courbe suivante. Le dépassement est élevé, la température monte à 50°C soit 10 °C de plus que la consigne de 40°C. La régulation ne se stabilise pas, elle oscille continuellement entre 39°C et 45°C…
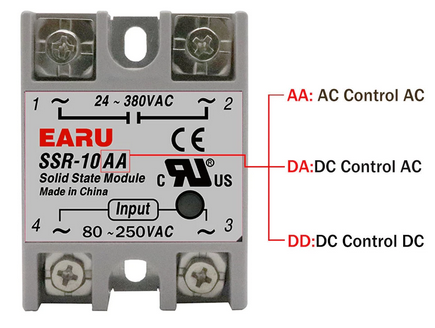
Relai statique SSR
Un relai statique SSR nécessite peu de courant pour être contrôlé (10mA à 5V pour le mien). Il peut dont être alimenté directement par une broche de l’Arduino. Je vous invite à lire cet article qui explique le contrôle par relais.
Le relais que j’utilise permet de contrôler un courant de 10 A sous une tension continue comprise entre 12 V et 220 V. La tension de contrôle est également continue et comprise entre 3 V et 32 V. Il s’agit de la référence SSR-10 DD.
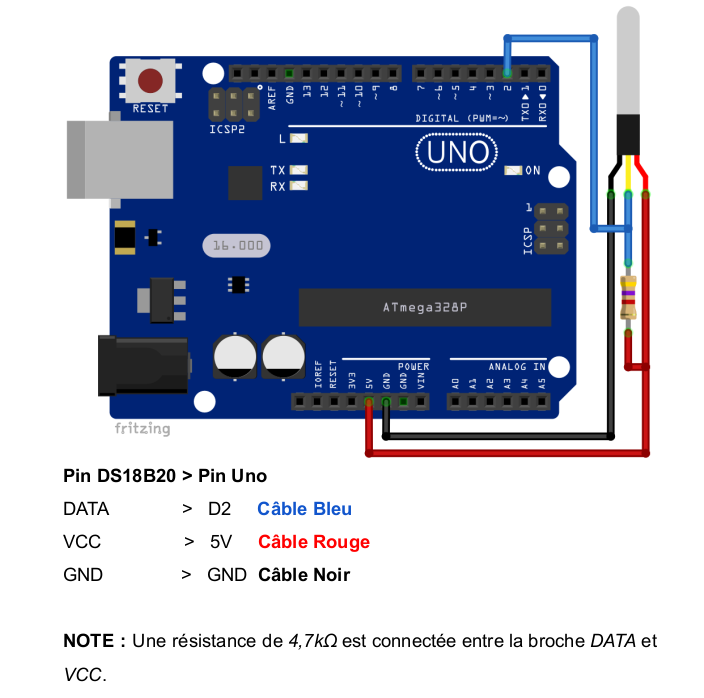
Le capteur de température DS18B20
Ce capteur de température permet de mesurer des températures comprises entre -55 °C et +125 °C. Il est équipé d’un boîtier en acier inoxydable que l’on peut facilement coller sur la plaque chauffante grâce à de la colle thermique.
Ne pas oublier de rajouter une résistance de rappel “pull-up” de 4,7 kΩ comme indiqué dans la documentation du capteur.
J’ai utilisé la librairie DallasTemperature pour ce tuto.

Cette librairie inclus de nombreux programmes d’exemple pour ce capteur. Le tuto se base sur le programme Simple dont voici le code :
// Include the libraries we need
#include <OneWire.h>
#include <DallasTemperature.h>
// Data wire is plugged into port 2 on the Arduino
#define ONE_WIRE_BUS 2
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
/*
* The setup function. We only start the sensors here
*/
void setup(void)
{
// start serial port
Serial.begin(9600);
Serial.println("Dallas Temperature IC Control Library Demo");
// Start up the library
sensors.begin();
}
/*
* Main function, get and show the temperature
*/
void loop(void)
{
// call sensors.requestTemperatures() to issue a global temperature
// request to all devices on the bus
Serial.print("Requesting temperatures...");
sensors.requestTemperatures(); // Send the command to get temperatures
Serial.println("DONE");
// After we got the temperatures, we can print them here.
// We use the function ByIndex, and as an example get the temperature from the first sensor only.
float tempC = sensors.getTempCByIndex(0);
// Check if reading was successful
if(tempC != DEVICE_DISCONNECTED_C)
{
Serial.print("Temperature for the device 1 (index 0) is: ");
Serial.println(tempC);
}
else
{
Serial.println("Error: Could not read temperature data");
}
}
Le programme complet
Voici le programme utilisé pour la régulation. Il utilise la librairie PID pour la régulation ainsi que la librairie DallasTemperature pour la mesure du capteur de température.
/*
PID regulation
Created March 2022
by Tutoduino
*/
// For PID regulation
#include <PID_v1.h>
// For DS18B20 sensor
#include <OneWire.h>
#include <DallasTemperature.h>
// DS18B20 sensor is on PIN 2 of the Arduino
#define ONE_WIRE_BUS 2
// Solid state relay is on PIN 4 of the Arduino
#define RELAY_PIN 4
// Sensor objects
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature sensors(&oneWire);
// PID variables
double Setpoint, Input, Output;
int WindowSize = 5000;
unsigned long windowStartTime, lastPrintTime;
// PID tuning parameters
double Kp=65, Ki=0.71, Kd=0;
// PID object
PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
// Function that controls activation or deactivation
// of the relay. The LED built into the Arduino is on when
// the relay is active, otherwise it is off.
void relay_state(bool state) {
digitalWrite(RELAY_PIN, state);
digitalWrite(LED_BUILTIN, state);
}
// Function that print temperature each second
void printTemperatureEverySec(double temp) {
if ((millis()-lastPrintTime) > 1000) {
lastPrintTime = millis();
Serial.println(temp);
}
}
// Setup function that runs once at startup
void setup()
{
// Define relay and led pins as output
pinMode(RELAY_PIN, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
// Set the relay to low state
relay_state(LOW);
Serial.begin(115200);
// Store current time in variables used by PID
// and display functions
windowStartTime = millis();
lastPrintTime = millis();
// Setpoint for the PID temperature control 40 degrees Celcius
Setpoint = 40;
// Tell the PID to range between 0 and the full window size
myPID.SetOutputLimits(0, WindowSize);
// Turn the PID on
myPID.SetMode(AUTOMATIC);
}
// Main loop function
void loop()
{
// Get the temperature from the sensor
sensors.requestTemperatures();
Input = sensors.getTempCByIndex(0);
printTemperatureEverySec(Input);
// Compute the PID
myPID.Compute();
/************************************************
* turn the output pin on/off based on pid output
************************************************/
if (millis() - windowStartTime > WindowSize)
{
//time to shift the Relay Window
windowStartTime += WindowSize;
}
if (Output < millis() - windowStartTime) {
relay_state(LOW);
}
else
relay_state(HIGH);
}
Bonjour,
Merci pour ce tutoriel très clair.
Etant débutant sur Arduino, je suis un peu en panne sur un projet qui me tient à coeur :
Réaliser un outil chauffant, régulé en température (c’est jusque-là ce que vous avez traité dans ce tuto), mais avec un afficheur LED (2 digits suffisent pour la plage 35-50°C souhaitée), affichant la température et les 3 boutons classiques (+, -, set) afin de pouvoir régler la consigne depuis cet afficheur.
Pourriez-vous svp m’aider sur ce projet ?
Merci par avance.
Amicalement,
Christophe.
Merci pour ce tutoriel.
Technicien électronicien de 1964 à 1992, j´ai assuré (et survécu) à de nombreux virages technologiques depuis les tubes à vide jusqu’aux microprocesseurs, mais j´ai principalement travaillé sur des circuits analogiques. Je n´ai jamais appris a programmer en C ou autre langage.
A 80 ans, passionné par la sculpture en céramique, j’ai construit un four et je me suis mis en tête de mesurer la température l´aide d´une carte Arduino Uno Rev. 3, d´un circuit Adafruit MAX 31856 et d´un thermocouple type S.
Il y a 2 paramètres qui m´intéressent : la température en º C et la pente de montée en température en º C / heure.
Dans un premier temps je peux utiliser le moniteur de IDE pour afficher les résultats. Dans un deuxième temps rajouter un afficheur LCD connect à la carte pour cela.
Pouvez-vous me suggérer un tutoriel qui puisse m´aider ?
Merci d´avance.
Ce tuto pourrait vous aider dans un premier temps pour tracer la courbe via le moniteur IDE https://tutoduino.fr/debuter/mesurer-et-tracer-une-tension/
Merci pour votre réponse.
J´ai l´impression d’avoir mis mon post de présentation au mauvais endroit dans le forum où le bar.
Sur la page d´accueil ça ne parait pas trés clair.
Bonjour,
Merci pour ce tuto.
Je me posais la question d’utiliser un mosfet au lieu du relais pour des questions de coûts. Est-ce que selon vous cela poserais un problème ? Ca nécessite une PCB adaptée certes mais en terme de place et de coûts c’est incomparable.
Bonjour.
Oui bien entendu, moins cher et plus petit. C’est d’ailleurs ce que j’ai fais ensuite mais je n’ai pas encore eu le temps de mettre à jour mon tuto.
Voir la fin de ce tuto si vous le souhaitez :
https://tutoduino.fr/tutoriels/controler-ventilateur-brushless-arduino/
bonsoir,
merci pour ce travail très intéressant que je voudrai adapter pour un TP avec mes élèves de 2ème année post bac. je voulais savoir si je pouvais avoir une photo du circuit complet ou du schémas de montage. mon idée est de rajouter 3 potentiomètres un pou Kp, un pour Ki et un pour Kd ainsi en jouant sur celui de Kp par exemple, ils verront l’effet sur la température de la plaque et ça devient plus parlant expérimentalement.
d’avance merci
bonjour
je travail pour regulation pid avec ardouino
esp8266 +relais statique +capteur de temperature LM35 +element chauffants
probleme element nest pas chauffer car relais ne passe pas la tension
le code nest fonction pas ??
Bonjour.
La tension de sortie de l’ESP8266 n’est pas suffisante pour faire basculer le relais statique probablement. Je vous invite à regarder au bas de cette page https://tutoduino.fr/debuter/controler-un-relai/, j’indique comment résoudre ce problème. J’ai testé et cela fonctionne bien avec un ESP8266 et un relai statique SSR-10 DD.
bonjour ,
tous d’abord merci pour votre tuto, cependant puisque je suis encore qu’une débutante je voulais savoir comment faire quand on a une résistance chauffante de 650W que je dois contrôler avec un relai statique ssr de 25A sachant que la température est mesurer par un thermocouple type K. le problème est que peu importe les valeurs de kp,ki et kd j’ai toujours des oscillation qui dépasse et une monter assez lente même si dans la configuration de la bibliothèque j’ai réduit le temps d’échantillonnage mais que dalle il met du temps a ce stabilise et il parvient à faire des pic de +80°C. que faire svp
et merci
Bonsoir Ness,
Une fenetre plus petite ne fait qu’augmenter la fréquence des oscillations. 5000 ou 5 secondes n’est pas trop pour du chauffage. La premiere chose a verifier est que la co.signe et la mesure de temperature son bien tous les deux en degrés. setpoint et Input. Il vous faut donc corriger la mesure en fo.ctiobde votre courbe de thermocouple. Ensuite, pour definir kp, il faut avoir quel effet a un allumage de la resistance pendant une milliseconde sur la temperature. Divisez ce deltat par le temps desire pour atteindre la consigne. Testez le resultat. Il doit y avoir des oscillations. Diminuer kp de moitie et definir ki=kp/5. Ca devrait etre plus lent mais converger. Ajouter un petit kd= ki/10 et voir l’effet. Apres. Augmenter/diminuer les valeurs de 5% et voir l’effet.
Bonsoir, votre tuto est vraiment super bien fait ! Cependant, mon but étant de contrôler la température d’une boîte 30*30 avec une température de consigne de 60 degrés soumise à des variations de T, je me demandais s’il était possible de remplacer le relai ssr par un générateur de courant /tension ? Si oui, à quoi ressemblerait le circuit et fonctionnera-t-il avec le code fourni ?
Merci par avance !
Bonjour,
Je galère à comprendre le fonctionnement général du PID.
A ce que je comprends votre sortie et tout ou rien. Mais je vois dans votre code :
myPID.SetOutputLimits(0, WindowSize);
Je comprends là que la sortie sera comprise entre 0 et 5000 ?
Est ce que dans ce cas la fonction retourne une durée comprise entre 0 et 5000, et vous mettez à 1 ou à 0 la sortie en fonction du temps retourné par la fonction ?
Et vous “computez” le PID à chaque itération ?
Bonsoir Loukos, Peut-etre avez-vous deja répondu a ces questions ? Je ne suis pas un spécialiste mais ce que je peux dire c’est que pour réguler la puissance de sortie, beaucoup de contrôleurs PID définissent un Temps de cycle ( ici 5000 ms mais qu’on peut modifier en fonction de la masse thermique) puis, en fonction du calcul PID, activer la sortie.
Si le calcul donne 58% de puissance, la sortie sera a 1 pendant 0,58 x 5000 ms
Bonjour, j’ai utilisée un code plus ou moins similaire avec la même bibliothèque mais dans les messages d’erreurs, on m’indique que la bibliothèque ”pid front end” est introuvable. J’ai essayé de la télécharger mais rien n’y fait ! Est-on obligé d’avoir cett bibliothèque ? Avez vous une solution, s’il vous plaît ?
Pouvez-vous copier-coller le message d’erreur exact ?
Bonjour Tutuino,
Super programme et merci pour ce tuto.
J’aurais une question, je suis moins encore qu’un débutant:
Comment faire pour remplacer le capteur décrit par un simple thermocouple type T ?
Merci par avance
Bonjour,
Merci beaucoup pour ce tutoriel.
Petite question concernant le relai, si je souhaite alimenter un système type petit heating pad en silicone (comme ceux sur des imprimantes 3Ds par exemple) qui accepte en input du 5/12V, est-ce que je peux du coup me rabattre sur les petits modules relai 5V pour arduino (raccordé à un AC/DC 12V 3A Power Supply Adapter) plutôt que les SSR présentés dans ce tutoriel (qui sont faits, si j’ai bien compris, pour recevoir et renvoyer directement du 220V via des grosses gaines).
Mon plan c’est de pouvoir contrôler&mesurer la température dans 2 boites de pétri via un système de chauffage par 2 heating pads, chacun situé en dessous d’une boite de petri (chaque boite de pétri contenant un DS18B20). Je serai ravi de pouvoir discuter de mon plan avec vous si vous en avez le temps et l’envie.
Bonjour,
Ce montage fonctionne avec tout type de relai. Attention toutefois à la puissance nécessaire au fonctionnement du relais. La puissance fournie par l’Arduino est limitée sur ses broches de sortie. Mais si vous utilisez un module relai 5V prévu pour l’Arduino cela sera parfait. Vous pouvez échanger avec moi via mon email indiqué sur la page contact si vous le souhaitez.
Voir cet article pour plus de détails sur le contrôle d’un relai par un Arduino https://tutoduino.fr/tutoriels/controler-ventilateur-brushless-arduino/
Je ne peut pas disposer de relais ssr et donc j’ai un relais avec optocoupleur comment pourrais je donc faire pour obtenir une régulation et aussi j’utilise comme capteur de température dht 22
Le principe reste le même avec tout type de relais.
Concernant le capteur vous pouvez regarder ici : https://tutoduino.fr/tutoriels/capteur-de-temperature-humidite-sans-fil/
Bonjour a tous
mon relai SSR ne se met jamais en fermeture totale meme quand la température est en dessous de la consigne, ne faut til pas mettre une résistance de tirage entre la borne d’entrée 3 +et 4- du relais ssr?
merci de vos propositions!
Pourriez-vous donner des détails sur votre montage ? Et comment voyez-vous que le relai n’est pas totalement fermé ?
Bonjour
merci beaucoup pour ce tuto bien expliqué, ce serait bien d’avoir le câblage, pour ceux qui apprennent comme moi !
est ce qu’avec un relai SSR DC Ac on pourai piloter une lampe chauffante a infra rouge et faire de la régulation pid
pour obtenir une température constante ?
Oui ce type de montage avec un relai SSR DC AC pourrait très bien piloter une lampe chauffante à infra rouge et faire de la régulation PID pour avoir une température constante.
Au niveau de votre schéma il est simple :
– Relier la broche 4 de l’Arduino à la broche + de l’input du relai SSR
– Relier la broche GND de l’Arduino à la broche – de l’input du relai SSR
– Relier la phase de votre alimentation à la broche – de l’output du relai SSR
– Relier le + de l’output du relai SSR à la phase de votre lampe
– Relier le neutre de votre alimentation au neutre de votre lampe
Attention à ne pas vous mettre en danger en manipulant du courant AC 220V…
Merci beaucoup, je vais essayer cela en faisant attention !
c’est un très bon Tutoduino
J’ai fait le câblage comme vous le préconisé, cela fonctionne très bien ,il me reste a peaufiné le PID tunning,pour ajuster au mieux
merci beaucoup, cela m’a beaucoup aidé Bonne journée.
Parfait, merci pour votre retour.
Bonjour
oui cela fonctionne mais c’est pas très facile pour trouver les bon Kp,Ki, Kd!
d’autant plus que je veux avoir plusieurs palier 30°,apres 35° après 40°, après 45°,50°,et 55°
il faudra que je change bien sur la consigne mais est ce qu’il ne faudra pas adapter les paramètres pid pour chaque niveau
peut on rajouter dans le programme la valeur qui entre dans le relai SSR a partir de la pin D4?
merci de votre aide.